AIは従来の言語予測モデルから、現実世界の物理法則や因果関係を模倣する「世界モデル」へと転換していく。世界モデルの実装により、AIの主戦場はデジタル空間のテキスト処理から、物理世界と直接的に相互作用する「フィジカルAI」へ移行する。
インフォグラフィック
解説動画
スライド資料
1分で音声解説(Spotifyポッドキャスト)
1. 「世界モデル」の技術的定義とパラダイムの移行
人工知能(AI)の基盤技術において、現在、自己回帰型の大規模言語モデル(LLM)から「世界モデル(World Models)」への構造的な移行が進行している。本章では、世界モデルの技術的な定義と、AIの学習アーキテクチャにおけるパラダイムの移行について分析する。
1.1 大規模言語モデル(LLM)の限界と世界モデルの概念
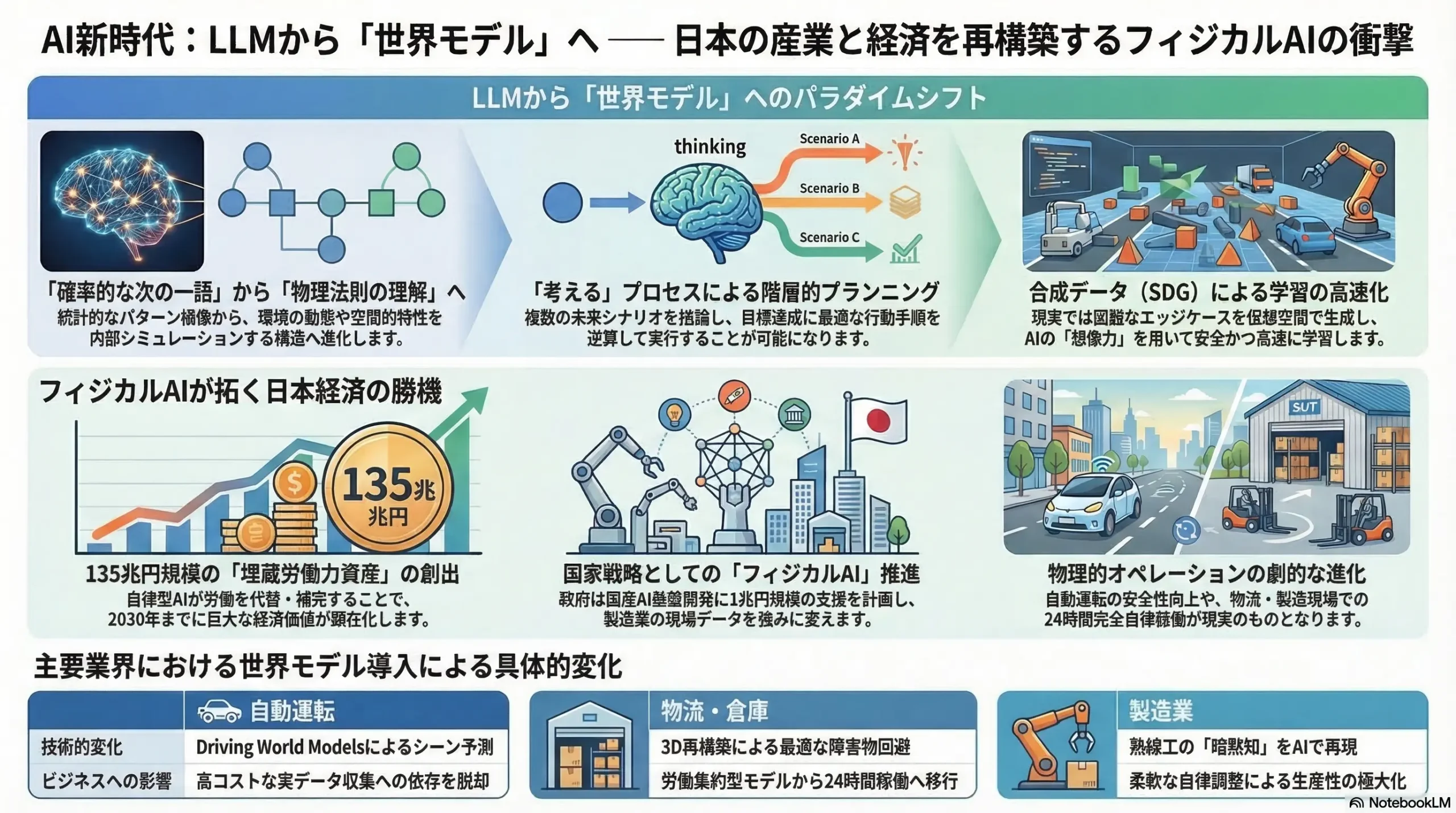
現在のAI市場を牽引しているLLMは、主に自己回帰的(Autoregressive)なトークン予測に基づいて機能している。この手法は、入力されたテキストデータに対して統計的に最も確率の高い次の一語(トークン)を逐次的に生成するものである 1。言語の表面的なパターンの模倣には極めて高い性能を示す一方で、現実世界の物理法則、空間的な関係性、因果関係をシステム内部で本質的に理解しているわけではない 1。その結果、論理的破綻やハルシネーション(幻覚)が発生しやすく、物理空間での自律制御に応用する際の大きな制約となっている 2。
この制約を突破する概念として提唱されているのが「世界モデル」である。世界モデルとは、環境の動態、物理法則、空間的特性をニューラルネットワーク内部でシミュレーションし、現実世界の振る舞いを予測するアーキテクチャを指す 3。人間の認知プロセスにおいて、落ちるグラスが割れることを理解するために何百万回もの事例を見る必要がないように、生物の知能は環境の無関係なノイズを排除し、事象を支配する因果関係に焦点を当てた内部シミュレーションを有している 3。世界モデルはこれと同様に、ピクセル単位で現実を再構築する(Generative Modeling)のではなく、情報の背後にある「潜在的な構造(Latent Structures)」や「意味的空間(Semantic Space)」を学習するアプローチを採用する 1。
1.2 Joint-Embedding Predictive Architecture (JEPA) の系譜
世界モデルの具体的な実装として、Yann LeCunらによって提唱された「Joint-Embedding Predictive Architecture(JEPA)」が中核的な役割を果たしている 1。JEPAは、自己教師あり学習(SSL)を通じて未来の状態表現を予測するエネルギーベースモデル(EBM)の一種である 2。EBMは、入力![][image1]と出力![][image2]の互換性が高い場合に低いエネルギー値を取り、互換性が低い場合に高いエネルギー値を取る関数$F(x, y)$を学習する仕組みを持つ 2。
JEPAの系譜は、扱うモダリティ(データ形式)の拡張とともに進化してきた。
| モデル名称 | 主な特徴と対象モダリティ | 技術的な進展と意義 |
|---|---|---|
| I-JEPA | 画像(Image)からの自己教師あり学習 | ピクセル単位の再構築を行わず、画像の抽象的な特徴表現を学習する基礎モデル。生成AIの非効率性に挑戦した第一歩 2。 |
| V-JEPA | 動画(Video)からの視覚的表現学習 | 時間的な連続性を持つ動画データから、未来の特徴表現を予測。連続的な動作や物理的変化の理解を可能にした 2。 |
| VL-JEPA | 視覚と言語(Vision-Language)の統合 | トークン空間ではなく「意味的空間」を用いて推論を行う。視覚情報と言語情報を統合し、より高度な意味理解を実現 1。 |
1.3 モデル崩壊の克服とLeJEPAの登場
JEPAのような自己教師あり学習のアプローチは、長年にわたり「モデル崩壊(Collapse)」という技術的課題に直面していた 5。これは、モデルがどのような入力に対しても同一の無意味な出力を返すようになってしまう現象である 5。従来の解決策は、ストップ勾配、モメンタムエンコーダー、非対称アーキテクチャ、指数移動平均といったヒューリスティック(経験則に基づく発見的枠組み)な手法に依存しており、ハイパーパラメータの調整が極めて困難で、学習プロセス自体が脆弱であった 5。
2025年11月、Randall BalestrieroとYann LeCunによって発表された「LeJEPA」は、この課題に対する数学的な解決策を提示した 5。LeJEPAは、SIGReg(Sketched Isotropic Gaussian Regularization)と呼ばれる新たな正則化手法を導入している 5。これは、学習された埋め込み(Embeddings)が等方性ガウス分布に従うことを強制する数学的制約であり、単一の損失項によってモデル崩壊を防ぐ 5。このアーキテクチャの簡略化により、世界モデルのトレーニングにおけるスケーラビリティと安定性が確保され、実用化への道筋が明確になった 5。
1.4 認知アーキテクチャと階層的プランニング
世界モデルの確立は、AIシステム全体を統合する「認知アーキテクチャ(Cognitive Architectures)」の構築を可能にする 7。このアーキテクチャは、人間の脳機能を模した複数のモジュールで構成される。具体的には、知覚(Perception)、記憶(Memory:海馬に相当)、世界モデル(World Model:前頭前野に相当)、コスト関数(Cost Functions:内発的動機や目標)、そしてアクター(Actor:行動生成)である 2。
世界モデルの役割は、現在観測されている状態と想定される行動の組み合わせから、未来の複数の妥当な状態表現を予測することである 2。環境は完全に予測可能ではないため、モデルは不確実性を伴う複数のシナリオを同時に推論する能力が求められる 2。これにより、AIは目標(コスト関数の最小化)を達成するための最適な行動手順を逆算的に探索する「階層的プランニング(Hierarchical Planning)」を実行できるようになる 7。言語モデルが発話前に高次な計画を持たないのに対し、世界モデルを持つAIは「考える(推論と計画)」プロセスを経てから行動や出力を行うため、より人間の知能に近い振る舞いが可能となる 2。
2. フィジカルAIへの進化と合成データ生成(SDG)
世界モデルの実装により、AIの主戦場はデジタル空間内のテキスト処理から、物理世界と直接的に相互作用する「フィジカルAI(Physical AI)」へと移行する 4。
2.1 フィジカルAIの動作原理とハードウェアの統合
フィジカルAIは、大規模言語モデルの推論能力に、3D空間における物理的振る舞いや空間的関係性の理解を統合したものである 4。画像、動画、テキスト、音声、現実世界のセンサーデータといったマルチモーダルな入力をリアルタイムで処理し、自律型機械(ロボットや自動運転車)のアクションへと変換する 4。
このプロセスは、以下の3つの計算段階を経て機能する 4。
- トレーニング(学習): 現実世界および合成データを用いて、世界基盤モデル(WFM: World Foundation Models)を訓練する。ここでは、物体認識、自然言語理解、複雑な動作計画が同時に学習される。
- シミュレーションと合成データ生成: 世界モデルを用いて構築された高精細な仮想環境(デジタルツイン)内で、強化学習(RL)や模倣学習(Imitation Learning)を行う。
- ランタイム実行: 最適化されたポリシーモデルを自律型ロボットや車両のエッジデバイス(例: NVIDIA Jetson Thorなど)に組み込み、ミリ秒単位で推論と行動計画を実行する。
2.2 合成データ生成(SDG)とシミュレーションの高度化
物理世界におけるAIの学習には、視覚的・空間的・物理的に正確なデータが大量に必要となるが、現実世界でのデータ収集は高コストであり、稀な事故などのエッジケースを安全に収集することは困難である 4。世界モデルは、このデータ不足(Data Scarcity)を解決する中核技術となる 4。
世界モデルは、入力データ(テキスト、画像、動作)から、物理的に妥当な未来の動画や環境推移を生成する 4。例えば、NVIDIAの「Cosmos」プラットフォームは、世界基盤モデル(WFMs)を活用し、物理法則を理解した高忠実度のトレーニングデータを生成する 4。Cosmos Predictはテキストや動画から30秒間の予測的動画を生成し、Cosmos Transferはシミュレーション映像を写真のようにリアルな映像(Photoreal)へと変換する 4。
| NVIDIA Cosmosの主要モジュール | 機能とフィジカルAIへの貢献 |
|---|---|
| Cosmos Predict | 環境の動態予測モデル。テキストや画像から未来の物理的な振る舞いを予測した動画を生成し、閉ループポリシーの学習やロボット中心のシミュレーション環境を提供する 4。 |
| Cosmos Transfer | シミュレーションから実写(Photoreal)への変換を行うマルチコントロールモデル。NVIDIA Isaac Simなどのフレームワークと連携し、多様な天候や照明条件での合成データ生成(SDG)を加速させる 4。 |
| Cosmos Reason | 視覚言語モデル(VLM)。事前知識、物理法則、常識を組み合わせてロボットやビジョンAIエージェントに人間レベルの推論能力を与え、リアルタイムのアラートや意思決定を支援する 4。 |
2.3 強化学習における「想像力」の活用
ロボティクス企業において現在主流となっているのは、人間がタスクを実演し、それをロボットにコピーさせる模倣学習(Imitation Learning)である 10。しかし、この手法は制御された環境下では機能するものの、未知の状況やわずかな環境変化に対しては脆弱である 10。
世界モデルは、ロボティクスにおける「学習後の強化学習(RL post-training)」を可能にする 10。ロボットは現実世界で行動を起こす前に、世界モデルが生成する仮想的なシミュレーション(想像の世界)の中で、さまざまな失敗モードやエッジケースを探索することができる 4。このプロセスを通じて獲得されたポリシー(行動規準)は、現実世界における長時間の連続自律稼働(10時間以上の人間介入なしでの稼働など)に耐えうる堅牢性を備えるようになる 10。
3. 日本の経済およびマクロ景気への影響
世界モデルを中核とするフィジカルAIの発展は、日本のマクロ経済に対して構造的な転換を促す重要な契機となる。日本の産業構造が抱える課題に対し、これらの技術が直接的な解決策を提供する。
3.1 「埋蔵労働力資産」の創出と生産性向上
日本経済の最大のボトルネックは、少子高齢化に伴う構造的な労働力不足である。2030年には「危機的な労働不足」による産業崩壊が懸念されているが、AIおよび自律型ロボットの配備は、これを物理的に補う手段となる 11。
マクロ経済の観点から見ると、AIの普及が新たな経済的価値を生み出すと試算されている。ITやAI技術の進展により、既存の定型業務が代替されることで創出される価値は、2030年時点で約120兆円にのぼる 12。これに、働きたくても働けない未活用労働力の価値を加えた約135兆円規模の「埋蔵労働力資産(Buried Labor Assets)」が、日本経済の成長を後押しする要因になると推計されている 12。世界モデルに基づく自律型AIが労働の代替を担うことで、人的資本はより高付加価値な企画・戦略業務へとシフトし、経済全体の労働生産性を押し上げる効果が期待される 12。
また、労働力を自律的に再生産・増殖できる存在としてのロボットが再定義されており、「マザーファクトリー」における自己増殖型生産サイクルの確立が政策として提言されている 11。これにより、労働供給の制約から解放された新たな生産体制の構築が見込まれる 11。
3.2 産業競争力の再構築と「フィジカルAI」戦略
スイスのビジネススクールIMDが発表した「世界競争力年鑑2025」において、日本の総合順位は35位に位置している 13。その要因として、ビジネス効率性の低さ、組織資本の脆弱性、デジタル化や起業・新陳代謝といった要素の弱さが指摘されている 13。日本の競争力向上には、知識資本、組織資本、デジタル化などを統合した構造改革が不可欠である 14。
この状況を打破するため、日本政府はAI競争における「勝ち筋」として、テキストベースの対話型AIではなく、日本の製造業が持つ豊富な産業データやハードウェア技術を活かせる「フィジカルAI」に焦点を当てている 15。経済産業省は、国産AIの基盤モデル開発に向けて2026年度からの5年間で約1兆円規模の支援を行う計画を打ち出した 15。これに呼応し、ソフトバンクやPreferred Networks(PFN)など国内企業十数社が新会社を設立し、1兆パラメータ級の大規模AIモデルを開発するプロジェクトが構想されている 15。この官民連携の動きは、米中のメガテック企業に対するデータ流出を防ぎ、日本独自の産業競争力を再構築するための国家戦略である 15。
4. とくに影響を受ける業界とユースケース
世界モデルの実装によって、物理的なオペレーションを伴う産業を中心に多大な影響が生じる。影響を受ける主要な業界とユースケースの構造を以下の表に示す。
| 影響を受ける業界 | 主なユースケースと技術的変化 | ビジネスおよび運用への影響 |
|---|---|---|
| 自動運転(モビリティ) | Driving World Models (DWM) による2D/3Dシーンの進化予測。Waymo Genie 3などの導入 9。 | 実環境での高コストなデータ収集への依存を脱却。複雑な市街地や異常気象時における安全性のシミュレーション検証が可能となる 4。 |
| 物流・倉庫 | 自律搬送システム(AMR)の24時間稼働。3D再構築による最適な経路生成と障害物回避 4。 | 2026年には3社に1社が物流ロボットを導入し、運用最適化フェーズへ移行。労働集約型モデルからの脱却とRaaSの普及 17。 |
| 製造業 | ロボットアームの把持力・位置の自律調整。材料開発におけるDXやサプライチェーン全体の予測モデル活用 4。 | トヨタ自動車や島津製作所などの事例に見られるように、熟練工の暗黙知(職人の眼など)をAIで再現し、ビジネスモデル変革を推進 18。 |
| 医療・介護・生活支援 | 生活空間での不定形オブジェクトの操作。居住者の文脈を理解した自律的なタスク遂行 19。 | トヨタのHSRとPFNの共同研究に代表されるように、環境変化に柔軟に対応し、全自動で部屋を片付けるレベルのサービスロボットが実用化 19。 |
4.1 モビリティ分野:自動運転におけるシミュレーション革命
自動運転車両(AV)は、フィジカルAIの最初の波を代表するユースケースである 8。実世界の運転シナリオは、広い視野角と高度な動的性質(歩行者の予期せぬ動き、他車の割り込みなど)を持つため、ルールベースのアプローチでは対応しきれない 9。Driving World Models (DWM) は、自己回帰型トランスフォーマーや拡散モデルなどの生成技術を活用し、物理的な妥当性を保ちながら2Dおよび3Dのシーンがどのように推移するかを予測する 9。3Dデータ表現は、構造の一貫性や精密な空間関係を保持するため、運転タスクにおいて極めて重要である 9。
具体例として、Waymoが導入した「Waymo World Model」は、Google DeepMindの多目的世界モデル「Genie 3」を基盤とし、自動運転のシミュレーション水準を大幅に引き上げた 16。このモデルは、カメラ映像とLiDARデータを含むマルチモーダルな高忠実度出力をリアルタイムで生成し、逆走車の回避や竜巻の発生といった極めて稀なイベントを仮想空間上で再現する 16。テキストプロンプトやシーンのレイアウト変更による高い制御性を備えており、エンジニアは無数の走行テストを安全な仮想環境内でスケールさせることが可能となる 4。
4.2 物流・製造分野:自律稼働と最適化のフェーズ
物流業界では、従事者の高齢化により労働集約型モデルの限界が顕在化している 17。2026年は、物流ロボットが「試験的導入」から稼働データを分析し運用を改善する「運用最適化フェーズ」への転換点と推計されており、3社に1社が何らかの物流ロボットを導入する見込みである 17。この領域では、NVIDIA Isaac ROSが提供するVisual SLAM(自己位置推定と環境地図作成)やnvBlox(3Dシーン再構築)を活用した自律搬送ロボット(AMR)が、非構造化環境でのナビゲーションを可能にする 4。企業には、パイロット導入からROIを検証し、RaaS(Robotics as a Service)を活用して段階的に拡張するアプローチが求められている 17。
製造業においては、これまでの産業用ロボットが固定された軌道を正確に反復するものであったのに対し、世界モデルを搭載したロボットは環境の不確実性(部品の配置誤差など)を推論し、動作を柔軟に補正する 4。国内の事例では、トヨタ自動車による材料開発DXや、晃祐堂における熟練した職人の「眼」のAIによる再現など、データサイエンスがものづくりの根幹に浸透している 18。
5. 個人の日常生活および社会構造への影響
フィジカルAIの社会実装は、産業界の生産性向上にとどまらず、社会インフラと個人のライフスタイルに多大な影響を及ぼす。
5.1 Society 5.0の具現化と地域間格差の是正
日本が提唱する未来社会のビジョン「Society 5.0」は、サイバー空間(仮想空間)とフィジカル空間(現実空間)を高度に融合させることで、経済発展と社会課題の解決を両立する人間中心の社会を指す 20。世界モデルは、デジタルと物理の境界を取り払う役割を果たし、このビジョンを直接的に下支えする。
交通分野におけるスマートモビリティの導入は、都市部の渋滞緩和や交通事故の減少をもたらす 21。さらに重要な点は、地方部における社会インフラの維持である。人口減少による自治体の財政難や公共サービスの低下は地域間格差を拡大させているが、自動運転バスの巡回システムやドローンを用いた物資配達システムが構築されることで、地方における生活の質(QOL)が維持・向上する 22。AIがインフラの運用を自律的に最適化することで、地理的制約に縛られない持続可能な地域社会の形成が促進される 22。
5.2 日常空間における自律型サービスロボットの浸透
個人の日常生活においても、受動的なスマート家電から、環境の文脈を理解する自律型エージェントへの移行が進む。トヨタの生活支援ロボット「HSR」とPFNの共同研究にみられるように、AIが深層学習技術を応用し、不定形な物(衣類や日用品など)を認識して把持し、動作計画を立てて全自動で部屋を片付けるといったタスクが実現しつつある 19。
このようなサービスロボットが家庭内に普及することで、家事労働や介護負担が軽減される。結果として、個人が「well-being(多様な幸せ)」を追求し、自ら課題を発見して探究的な活動に時間を充てることが可能となる 20。教育面でも、社会の変化に対応するため、科学・技術・工学・芸術・数学を統合したSTEAM教育の重要性が一層高まっている 20。
6. 日本の企業経営者が取るべき事業戦略とガバナンス
世界モデルによるフィジカルAIの台頭は、事業環境に急激な変化をもたらす。企業経営者は技術の導入に留まらず、法規制への対応、ITインフラの刷新、組織構造の包括的な見直しを進める必要がある。
6.1 AI推進法に基づくガバナンスとリスク管理
日本では、人工知能の発展と信頼基盤の造成を目的とした「AI推進法(AI基本法)」が2026年1月22日に施行された 23。この法律は、イノベーションの促進とリスク管理のバランスを重視しており、AIを利用・提供する事業者に対し自律的なガバナンス体制の構築を求めている 23。
特に同法第35条では、自動運転や医療診断、重要インフラの制御など、人々の基本権や身体の安全に重大な影響を及ぼす可能性のある「高影響AI」を取り扱う企業に対し、事前影響評価の実施を勧告している 24。経営陣は、以下の表に示すようなリスク・機会のマトリクスを参考に、自社のAI製品が目指す分野と状況に応じた具体的なシナリオを導出し、データ収集からフィードバックに至るプロセスを詳細に記録・評価する体制を整備しなければならない 23。
| 産業分野 | 機会(ポジティブな影響) | リスク(ネガティブな影響) | 対応策・ガバナンスの方向性 |
|---|---|---|---|
| 研究開発 | 資金増加、計算資源の整備 | 国際競争の激化 | 戦略的研究領域への集中投資 23 |
| 産業応用 | 生産性向上、新サービスの創出 | 既存産業の破壊 | 段階的導入と再教育プログラムの実施 23 |
| 雇用・労働 | 高付加価値職の増加 | 単純労働の自動化による失業 | 労働移行支援とリスキリングの提供 23 |
| プライバシー | (該当なし) | 個人情報漏洩、監視社会化の懸念 | 透明性の確保、厳格なデータ保護プロトコル 23 |
6.2 エッジ・ファースト戦略とマルチモデルの統合
AIが物理世界と結びつき、状況を判断して自律的に実行するようになるにつれ、ITアーキテクチャはクラウド依存から「エッジコンピューティング」へと移行する必要がある 25。クラウドを経由する処理は、ネットワーク遅延(レイテンシ)による判断の遅れやプライバシー漏洩のリスクを伴う 25。工場や道路上でミリ秒単位の意思決定を行うためには、データの発生源である現場(エッジ)に計算資源を配置する分散型アーキテクチャの構築が不可欠である 25。エッジ・ファーストの採用は、速度、安全性、規制対応、コストという制約条件を同時に満たすための戦略的判断となる 25。
また、企業が導入するAIの形態も単一の巨大モデルから多様化する。調査によると、経営層の約8割が「2030年までに自社のAI機能はマルチモデルになる」と予測している 26。基盤モデルに加えて、小型でカスタム化されたモデルを複数組み合わせ、さまざまな業務プロセスにAIを展開している組織は、2030年までに24%高い生産性向上と55%高い営業利益率を見込んでいる 26。将来的な量子コンピューティングの補完的活用までを見据え、複数のAIモデルを適材適所で統合できる技術インフラの整備が求められる 26。
6.3 組織構造の再設計とマインドセットの醸成
AI技術の進化は、企業内の職務要件を根底から変容させる。約6割の経営層が「現在の従業員スキルの大半が2030年までに陳腐化する」と予想しており、特定のITスキルの寿命は極めて短くなっている 26。
この環境下において、経営陣はITスキルの習得だけでなく、変化に適応し新たな課題を発見できる「マインドセット」を重視した人材育成を行わなければならない 18。AIからより大きな事業価値を引き出す組織(AIファーストの組織)は、既存の業務にAIを当てはめるのではなく、AIを前提とした「全く新しい職務」を創出し、組織構造を見直す傾向が強い 26。経営層の隣にデータサイエンスの知見を配置し、顧客目線でのビジネスモデル変革を主導できる人材(島津製作所の事例などに見られるDX推進人材)の育成が、持続的成長の鍵を握る 18。
7. 結論
AIの「世界モデル」への移行は、テキストの確率的予測に留まっていた知能を、現実の物理空間における因果関係や動態の理解へと引き上げる技術的パラダイムシフトである。JEPAなどのアーキテクチャに支えられたこの技術は、AIに階層的プランニングの能力を与え、大規模な合成データの生成を通じて物理シミュレーションを高度化させた。これにより、エッジケースへの対応が課題であった自律型システム(ロボットや自動運転)の堅牢性が向上し、フィジカルAIの本格的な社会実装が始まっている。
日本にとって、この潮流は、深刻化する労働力不足を補う135兆円規模の「埋蔵労働力資産」を顕在化させ、デジタル競争で後れを取っていた産業構造を製造・物流などの物理的強みを活かして再構築する好機である。企業経営者は、2026年に施行されたAI推進法に基づくガバナンス体制を早急に構築し、クラウドからエッジコンピューティングへのアーキテクチャ移行を進めるとともに、陳腐化するスキルセットに代わる新たなマインドセットを持つ組織へと変革することが求められる。物理世界の法則を理解して自律的に行動するAIと、それを統治・活用する人間との新たな協調関係の構築が、今後の事業競争力を決定づける。
引用文献
- Meta’s VL-JEPA vs LLMs | The Next Shift in AI, https://www.youtube.com/watch?v=aTvcEMQYsJA
- Deep Dive into Yann LeCun’s JEPA | Rohit Bandaru, https://rohitbandaru.github.io/blog/JEPA-Deep-Dive/
- From Pixels to Purpose: The Evolution of JEPA and the Birth of Autonomous World Models, https://medium.com/ai-simplified-in-plain-english/from-pixels-to-purpose-the-evolution-of-jepa-and-the-birth-of-autonomous-world-models-6c8782bd527b
- What Is a World Model? | NVIDIA Glossary, https://www.nvidia.com/en-us/glossary/world-models/
- A New Kind of AI Is Emerging And Its Better Than LLMS?, https://medium.com/@cognidownunder/a-new-kind-of-ai-is-emerging-and-its-better-than-llms-95d3d80b7427
- World Models Explained: JEPA, Energy-Based Learning and the Limits of LLMs – YouTube, https://www.youtube.com/watch?v=Dcs9ZPA0d-k
- Yann LeCun | Self-Supervised Learning, JEPA, World Models, and the future of AI, https://www.youtube.com/watch?v=yUmDRxV0krg
- Nvidia Intros Data Factory, Robotics Models in Physical AI Push, https://aibusiness.com/robotics/nvidia-intros-data-factory-robotics-models-for-physical-ai
- The Role of World Models in Shaping Autonomous Driving: A Comprehensive Survey, https://arxiv.org/html/2502.10498v1
- Can world models unlock general purpose robotics?, https://www.bvp.com/atlas/can-world-models-unlock-general-purpose-robotics
- 【政策提言】LexxPluss代表 阿蘓将也、経済産業省へ「フィジカルAIを100年インフラへ」を提言, https://prtimes.jp/main/html/rd/p/000000051.000056714.html
- さらに2030年にはIT・AIの進展で120兆円の新たな価値創出へ ~135兆円規模の「埋蔵労働力資産」の創出と活用が、日本の経済成長を後押し~ | 株式会社うるる, https://www.uluru.biz/news/14928
- IMD「世界競争力年鑑2025」からみる日本の競争力 第1回:データ解説編, https://www.mri.co.jp/knowledge/insight/20251125.html
- IMD「世界競争力年鑑2025」からみる日本の競争力 第2回:分析編, https://www.mri.co.jp/knowledge/insight/20251125_2.html
- 【2025年最新】日本の国産AI開発に1兆円投資!ソフトバンク主導で世界に挑む「フィジカルAI」戦略を徹底解説 – Zenn, https://zenn.dev/headwaters/articles/d0ea5ff9c25c21
- The Waymo World Model: A New Frontier For Autonomous Driving Simulation, https://waymo.com/blog/2026/02/the-waymo-world-model-a-new-frontier-for-autonomous-driving-simulation
- 2026年物流ロボット市場予測:注目技術とビジネス機会を徹底分析 – LOGITO(ロジト), https://logito.djk.co.jp/?mode=column_view\&key=119
- 【2026年最新版】DX事例30選:9つの業界別に紹介~有名企業はどんなDXをやっている?~ | DOORS DX – ブレインパッド, https://www.brainpad.co.jp/doors/contents/dx_learned_from_successful_cases/
- トヨタ自動車×Preferred Networks | 市場のニーズに応えるサービスロボットの共同開発を開始, https://tomoruba.eiicon.net/articles/1059
- Society 5.0 – 科学技術政策 – 内閣府, https://www8.cao.go.jp/cstp/society5_0/
- Society 5.0とは?新しい時代に向けた取り組みを紹介 – シリコンスタジオ, https://tech.siliconstudio.co.jp/column/contents24/
- Society5.0とは?超スマート社会への取組事例|社会課題と経済発展を解決する指針を考察 | 製造業関連のお役立ちメディアならNikken→Tsunagu, https://www.nikken-totalsourcing.jp/business/tsunagu/column/987/
- AI推進法とは?(人工知能関連技術の研究開発及び活用の推進 …, https://www.enegaeru.com/aipromotionact
- AIの影響評価、なぜ今必要なのか, https://www.mk.co.kr/jp/society/11991854
- 2026年、エッジAIが社会を動かす理由とは?クラウドAIとの決定的違いと日本の最前線, https://ai.reinforz.co.jp/132
- IBM調査: AIは2030年に向けて、継続的な事業成長をけん引する存在として台頭, https://jp.newsroom.ibm.com/2026-03-12-ibm-study-ai-poised-to-drive-smarter-business-growth-through-2030